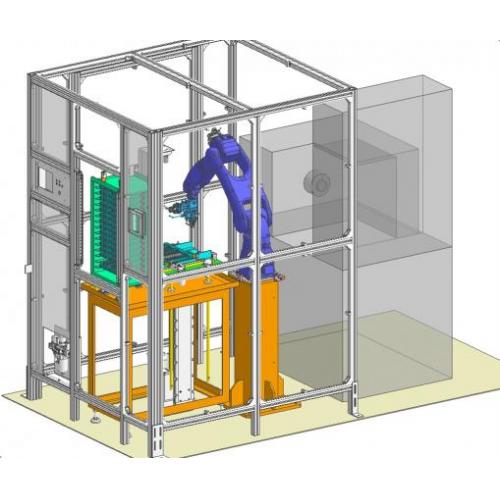
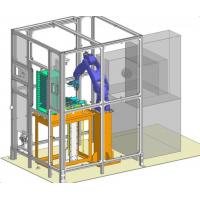
ロボットシステムの一例:工作機械ワーク投入取出ロボットシステム
【対象ワーク】 ステアリングシャフト
【工程/機能】 部品加工工程/ロボットハンドリング
【顧客業種】 精密シャフト製造メーカー
【特徴1/ロボットハンドリング】
・NC旋盤への投入取出し。タクト低減の為、ハンドを2個使用にし、投入と取出しを使い分け。
【特徴2/トレー入替え】
・ストッカーにセットされたトレーを加工前、加工後を管理し、適宜トレー入替えを行なう。
【製品長所】
1. 従来、人手作業でワークの脱着を行っていた工程をロボットにて自動脱着を行なうことで省人化を実現。
2. 部品トレーは加工前のワークを取出し、加工後には取り出した所に戻すことにより、同じトレーを使用し、省スペース化。
3. 垂直多関節ロボットを採用により、ワーク形状が変更になった場合でもハンド部の形状変更のみで対応可能。
お問い合わせ
商品サービス情報一覧
企業情報
- 企業名
- 株式会社光伸(事業所概要詳細)
- 所在地
-
大阪府八尾市